Lane lines detection for self-driving cars

Detect lane lines in images using Python and OpenCV.
Finding Lane Lines on the Road
This is project has an upgraded version:
Advanced Lane lines detection for self-driving cars.
When we drive, we use our eyes to decide where to go. The lines on the road that show us where the lanes are act as our constant reference for where to steer the vehicle. Naturally, one of the first things we would like to do in developing a self-driving car is to automatically detect lane lines using an algorithm.
In this project lane lines in videos are detected using Python and OpenCV.
The goals / steps of this project are the following:
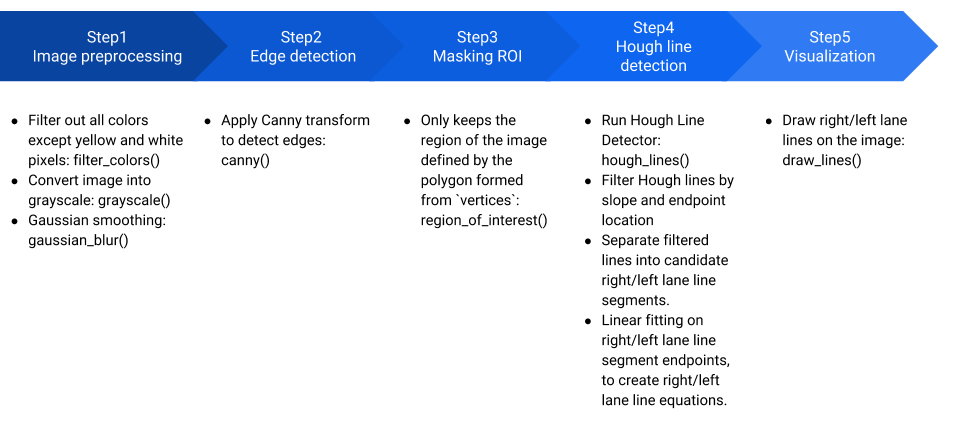
The code is available on: Github