RANSAC
RANSAC = Random Sample Consensus Error Function
RANSAC is an algorithm to find the right matches of features so can compute the pose/ transform/ fundamental ... the model.
Basic Idea
Loop over a randomly-proposed model, find which points belong to it (inliers) and which don't (outliers), eventually choosing the model with the most inliers.
Algorithm
- Sample (randomly) the number of points required to fit the model
- Solve the model parameters using sample
- Score by the fraction of inliers within a preset threshold of the model.
- Repeat 1-3 unitl the best model is found with high confidence.
RANSAC for general model
Minimal set
The smallest number of samples from which the model can be computed.
- Line: 2 points
Image transformations are models. Minimal set of of point pairs/matches:
- Translation: pick one pair of matched points
- Homography (for plane) - pick 4 point pairs
- Fundamental matrix - pick 8 point pairs
General RANSAC algorithm
- Randomly select points (or point pairs) to form a sample
- Instantiate the model
- Get consensus set : The points within error bounds (distance threshold) of the world
- If , terminate and return model.
- Repeat for trials, return model with max
Choosing the parameters
- Initial number of points in the minimal set :
- Typically minimum number needed to fit the model
- Distance threshold
- Assume location noise is Gaussian with
- For 95% cumulative threshold t when Gaussian with : . Choose so probability for inlier is high (e.g. 0.95)
- Number of samples
- Choose so that, with probability , at least one random sample set is free from outliers (e.g. )
- Need to set based upon the outlier ratio .
Calculate N
The number of features we found is completely irrelevant!
- 𝑠 – number of points to compute solution
- 𝑝 – probability of success
- 𝑒 – proportion outliers, so % inliers =(1 − 𝑒)
- 𝑃 (𝑠𝑎𝑚𝑝𝑙𝑒 𝑠𝑒𝑡 𝑤𝑖𝑡ℎ 𝑎𝑙𝑙 𝑖𝑛𝑙𝑖𝑒𝑟𝑠) =
- 𝑃(𝑠𝑎𝑚𝑝𝑙𝑒 𝑠𝑒𝑡 𝑤𝑖𝑙𝑙 ℎ𝑎𝑣𝑒 𝑎𝑡 𝑙𝑒𝑎𝑠𝑡 𝑜𝑛𝑒 𝑜𝑢𝑡𝑙𝑖𝑒𝑟) =
- 𝑃(𝑎𝑙𝑙 𝑁 𝑠𝑎𝑚𝑝𝑙𝑒𝑠 ℎ𝑎𝑣𝑒 𝑜𝑢𝑡𝑙𝑖𝑒𝑟) =
- We want 𝑃(𝑎𝑙𝑙 𝑁 𝑠𝑎𝑚𝑝𝑙𝑒𝑠 ℎ𝑎𝑣𝑒 𝑜𝑢𝑡𝑙𝑖𝑒𝑟) < (1 − 𝑝)
- So
, but not the number of points!
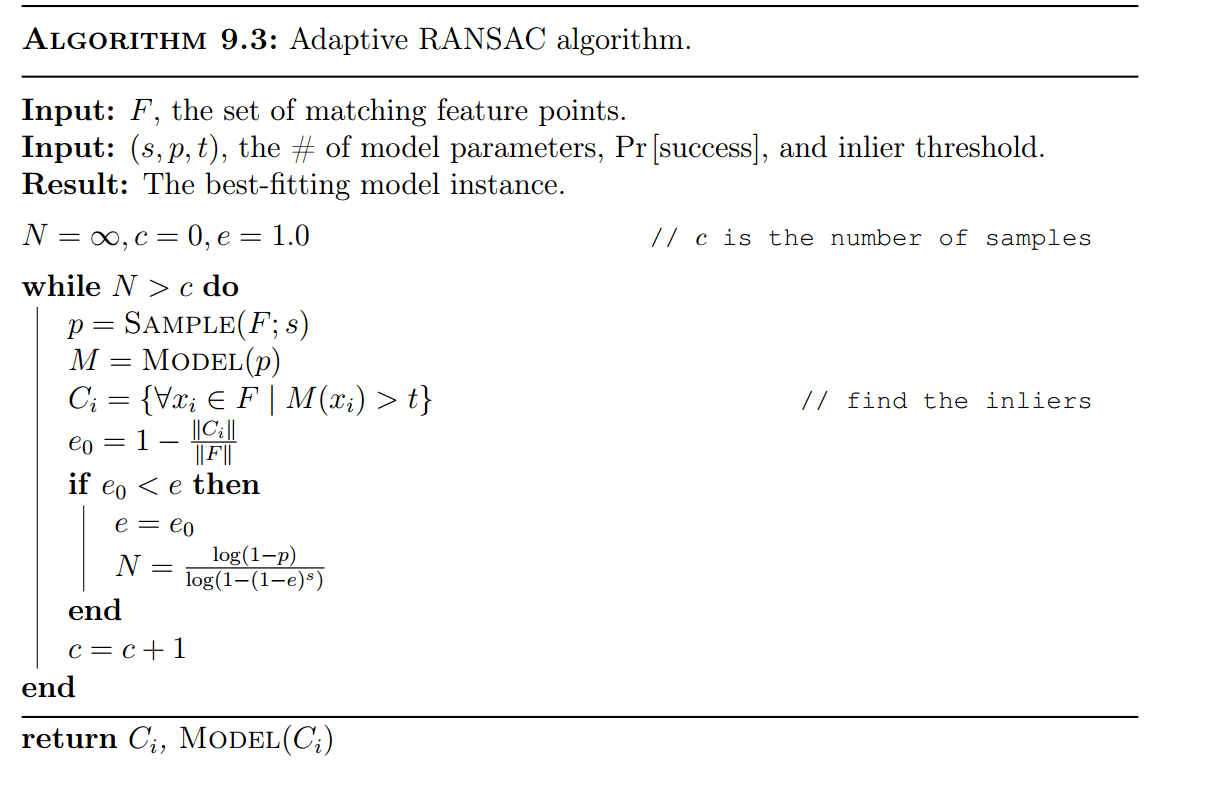
Adaptive RANSAC algorithm
Example: Estimating a Homography
- Select 4 feature pairs (at random)
- Compute homography 𝑯 (exact)
- Compute inliers where 𝑆𝑆𝐷(𝑝𝑖’, 𝑯 𝑝𝑖 ) < 𝜀
- Keep largest set of inliers
- Re-compute least-squares 𝑯 estimate on all of the inliers
Benefits and Downsides
Good
- Simple and general
- Applicable to many different problems, often works well in practice
- Robust to large numbers of outliers
- Applicable for larger number of parameters than Hough transform
- Parameters are easier to choose than Hough transform
Downside
- Computational time grows quickly with the number of model parameters
- Not as good for getting multiple fits
- Really not good for approximate models
Common applications of RANSAC
- Computing a homography (e.g. image stitching) or other image transform
- Estimating fundamental matrix (relating two views)
- Pretty much every problem in robot vision