Tracking as Inference
1. Inference system
- Hidden State (): True parameters we care about
- Measurement (): Noisy observation of underlying state
At each time step , state changes (from to ), and we get a new observation
Our goal: recover most likely state given:
- All observation seen so far
- Knowledge about dynamics of state transitions
2. Steps of Tracking
2.1 Prediction
What is the next state of the object given past measurements?
2.2 Correction
Compute an updated estimate of the state from prediction and measurements
2.3 Tracking
The process of propagating this posterior distribution of state given measurements across time.
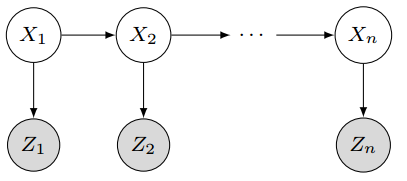
3. Simplifying Assumptions
3.1 Only the immediate past matters: (dynamics model)
3.2 Measurements depend only on the current state: (observation model)
This is a Hidden Markov Model (HMM)