Packages & Catkin Workspaces
Catkin packages
ROS software is organized and distributed into packages, which are directories that might contain source code for ROS nodes, libraries, datasets, and more. Each package also contains a files with build instructions - the CMakeLists.txt file - and a package.xml file with information about the package. Packages enable ROS users to organize useful functionality in a convenient and reusable format.
Catkin Workspace
A catkin workspace is a top-level directory where you build, install, and modify catkin packages. The workspace contains all the packages for your project, along with several other directories for the catking system to use when building executables and other targets from your source code.
Create a Catkin Workspace
Step 1: Create a catkin workspace and a sub directory
All of the ROS-related code you develop throughout this course will reside in your catkin workspace. You only need to create and initialize the workspace once.
First, create the top level catkin workspace directory and a sub-directory named src (pronounced source). The top level directory name is arbitrary, but is often called catkin_ws (an abbreviation of catkin_workspace), so we will follow this convention. You can create these two directories in /home/workspace/ with a single command:
$ mkdir -p /home/workspace/catkin_ws/src
Step 2: Navigate to the source directory
Next, navigate to the src directory with the cd command:
$ cd /home/workspace/catkin_ws/src
Step 3: Initialize the catkin workspace
Now you can initialize the catkin workspace which will create a CMakeLists.txt file:
$ catkin_init_workspace
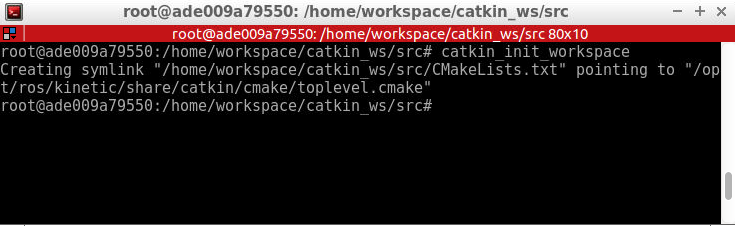
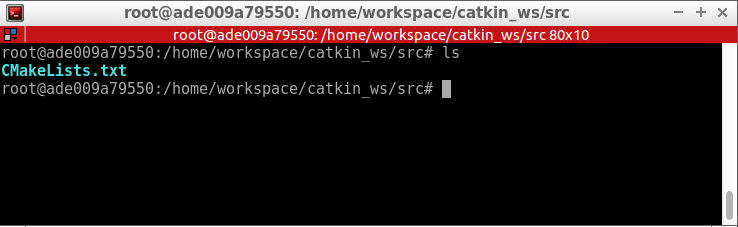
Let’s list the contents of the current directory to see what changed.
$ ls -l
Notice that a symbolic link (CMakeLists.txt) has been created to /opt/ros/kinetic/share/catkin/cmake/toplevel.cmake
Step 4: Return to top level directory
Return to the catkin_ws,
$ cd /home/workspace/catkin_ws
Step 5: Build the Workspace
$ catkin_make
Note: you must issue this command from within the top level directory (i.e., within catkin_ws NOT catkin_ws/src)
While it is not essential that you have a deep understanding of the catkin build system, particularly if you are doing most of your development work in Python, it is helpful to learn about it. We encourage you to read the ROS wiki.
After the command is executed you will notice the output of the build processes being echoed to your display. When it has finished you should see the following lines at the end of the output:
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /home/workspace/catkin_ws/build
#### Running command: "make -j4 -l4" in "/home/workspace/catkin_ws/build"
But what else has changed? Use the ls command again to see what is new.
$ ls
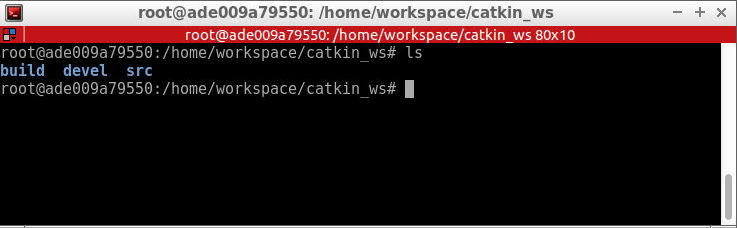
You now have two new directories: build and devel. The aptly named build directory is the build space for C++ packages and, for the most part, you will not interact with it. The devel directory does contain something of interest, a file named setup.bash. This setup.bash script must be sourced before using the catkin workspace with source devel/setup.bash
Optional
Before you begin to work with and develop your own ROS package, you can take a moment to get acquainted with catkin workspace conventional directory structure as described in the ROS Enhancement Proposal (REP) 128 by clicking here.
Add a Package
1. Cloning the simple_arm Package
One of the biggest benefits of using ROS is that it has a really large community of users and developers who have already created a lot of code that you can reuse.
Let’s clone an existing package and add it to our newly created workspace.
Start by navigating to the src directory and cloning the simple_arm package for this lesson from its GitHub repo.
$ cd /home/workspace/catkin_ws/src/
$ git clone -b first_interaction https://github.com/udacity/RoboND-simple_arm/simple_arm
2. Building the simple_arm package
After the repo has finished cloning, you can change directory to the top-level of the ROS workspace and build the new package.
$ cd /home/workspace/catkin_ws/
$ catkin_make
Rosdep
ROS Package Dependencies
ROS packages have two types of dependencies: build dependencies and run dependencies.
The rosdep tool will check for a package's missing dependencies, download them, and install them.
To check for missing dependencies in a ROS package:
$ rosdep check <package name>
Note: In order for the command to work, the workspace must be first sourced with source devel/setup.bash.
This gives you a list of the system dependencies that are missing, and tells you where to get them.
To have rosdep install packages, invoke the following command from the root of the catkin workspace
$ rosdep install -i <package name>
simple_arm Package Dependencies
Fortunately, the build and run dependencies for simple_arm package have been already installed in the workspace. You can double-check using rosdep check:
$ cd /home/workspace/catkin_ws/
$ source devel/setup.bash
$ rosdep check simple_arm
Output: All system dependencies have been satisfied.
Create your own Packages
You'll begin your dive into ROS packages by creating one of your own. All ROS packages should reside under the src directory.
Assuming you have already sourced your ROS environment and your catkin workspace, navigate to the src directory:
$ cd /home/workspace/catkin_ws/src
The syntax for creating a catkin package is:
$ catkin_create_pkg <your_package_name> [dependency1 dependency2 …]
The name of your package is arbitrary but you will run into trouble if you have multiple packages with the same name in your catkin workspace. Try to make it descriptive and unique without being excessively long. Let’s name ours “first_package” and we won’t specify any dependencies. By convention, package names are lowercase.
$ catkin_create_pkg first_package
Voilà. You just created your first catkin package! Navigating inside our newly created package reveals that it contains just two files: CMakeLists.txt and package.xml. This is a minimum working catkin package. It is not very interesting because it doesn't do anything, but it meets all the requirements for a catkin package. One of the main functions of these two files is to describe dependencies and how catkin should interact with them. We won’t pay much attention to them right now.
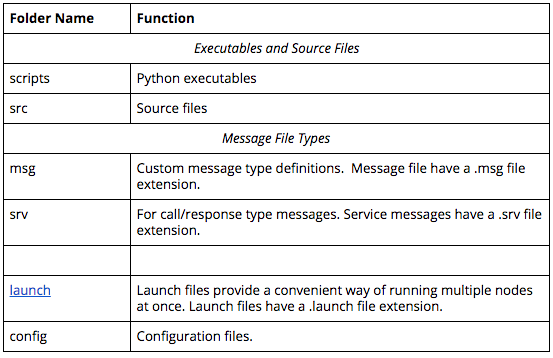
I mentioned earlier that ROS packages have a conventional directory structure. Let’s take a look at a more typical package.
- scripts (python executables)
- src (C++ source files)
- msg (for custom message definitions)
- srv (for service message definitions)
- include -> headers/libraries that are needed as dependencies
- config -> configuration files
- launch -> provide a more automated way of starting nodes
Other folders may include
- urdf (Universal Robot Description Files)
- meshes (CAD files in .dae (Collada) or .stl (STereoLithography) format)
- worlds (XML like files that are used for Gazebo simulation environments)
There are many packages that you can install. To see a list of available packages for the Kinetic distribution, take some time to explore the list of ROS package online.