ROS Essentials
ROS Summary
- Open source
- Hardware abstraction of device drivers
- Communication via message passing
- Slick build and package management
- Tools for visualization, simulation, analysis
- Powerful software libraries
Nodes and Topics
3 high level steps:
- Perception
- Decision Making
- Actuation
ROS breaks down the three major steps into separate nodes, for example:
Parameter server (Master)
Acts as a central repository where nodes on a system can look up parameter values.
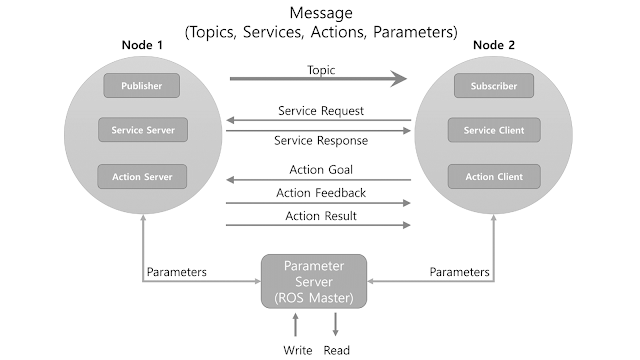
Topics
Nodes pass messages to one another via topics, which you can think of as a pipe connecting two nodes. Nodes can share data with one another by passing messages over topics.
To send a message, a node publish to that topic.
To receive a message, a node subscribes to a topic.
Message Passing
Over pre-defined 200 message types + user-defined types
For example:
Physical Quantities: positions, velocities, rotations.
Sensor Readings: laser scan, images, point clouds
Services
Request-Response type Like topics, services allow the passing of messages between nodes. However, services have no publishers or subscribers. Instead, nodes interact with each other one-by-one by using request and response messages.
Compute Graph
An RQT graph
ROS Terminology
| Type | Features | Direction | Description |
|---|---|---|---|
| Topic | Asynchronous | Unidirectional | Used when exchanging data continuously |
| Service | Synchronous | Bi-directional | Used when request processing requests and responds current states |
| Action | Asynchronous | Bi-directional | Used when it is difficult to use the service due to long response times after the request or when an intermediate feedback value is needed. |
ROS ROS provides standard operating system services such as hardware abstraction, device drivers,implementation of commonly used features including sensing, recognizing, mapping, motion planning, message passing between processes, package management, visualizers and libraries for development as well as debugging tools.
Master The master 2 acts as a name server for node-to-node connections and message communication. The command roscore is used to run the master, and if you run the master, you can register the name of each node and get information when needed. The connection between nodes and message communication such as topics and services are impossible without the master.
Node A node 4 refers to the smallest unit of processor running in ROS. Think of it as one executable program. ROS recommends creating one single node for each purpose, and it is recommended to develop for easy reusability. For example, in case of mobile robots, the program to operate the robot is broken down into specialized functions. Specialized node is used for each function such as sensor drive, sensor data conversion, obstacle recognition, motor drive, encoder input, and navigation.
Package A package 6 is the basic unit of ROS. The ROS application is developed on a package basis, and the package contains either a configuration file to launch other packages or nodes. **Metapackage** A metapackage 7 is a set of packages that have a common purpose. For example, the Navigation metapackage consists of 10 packages including AMCL, DWA, EKF, and map_server.
Message A node 8 sends or receives data between nodes via a message. Messages are variables such as integer, floating point, and boolean. Nested message structure that contains another messages or an array of messages can be used in the message.
Topic The topic 9 is literally like a topic in a conversation. The publisher node first registers its topic with the master and then starts publishing messages on a topic. Subscriber nodes that want to receive the topic request information of the publisher node corresponding to the name of the topic registered in the master.
Publish and Publisher The term ‘publish’ stands for the action of transmitting relative messages corresponding to the topic. The publisher node registers its own information and topic with the master, and sends a message to connected subscriber nodes that are interested in the same topic. The publisher is declared in the node and can be declared multiple times in one node.
Subscribe and Subscriber The term ‘subscribe’ stands for the action of receiving relative messages corresponding to the topic. The subscriber node registers its own information and topic with the master, and receives publisher information that publishes relative topic from the master. Based on received publisher information, the subscriber node directly requests connection to the publisher node and receives messages from the connected publisher node. A subscriber is declared in the node and can be declared multiple times in one node
Service The service 10 is synchronous bidirectional communication between the service client that requests a service regarding a particular task and the service server that is responsible for responding to requests.
Service Server The ‘service server’ is a server in the service message communication that receives a request as an input and transmits a response as an output. Both request and response are in the form of messages. Upon the service request, the server performs the designated service and delivers the result to the service client as a response. The service server is implemented in the node that receives and executes a given request.
Service Client The ‘service client’ is a client in the service message communication that requests service to the server and receives a response as an input. Both request and response are in the form of message. The client sends a request to the service server and receives the response. The service client is implemented in the node which requests specified command and receives results.
Action The action 11 is another message communication method used for an asynchronous bidirectional communication. Action is used where it takes longer time to respond after receiving a request and intermediate responses are required until the result is returned. The structure of action file is also similar to that of service. However, feedback data section for intermediate response is added along with goal and result data section which are represented as request and response in service respectively. There are action client that sets the goal of the action and action server that performs the action specified by the goal and returns feedback and result to the action client.
Action Server The ‘action server’ is in charge of receiving goal from the client and responding with feedback and result. Once the server receives goal from the client, it performs predefined process.
Action Client The ‘action client’ is in charge of transmitting the goal to the server and receives result or feedback data as inputs from the action server. The client delivers the goal to the action server, then receives corresponding result or feedback, and transmits follow up instructions or cancel instruction.
Parameter The parameter 12 in ROS refers to parameters used in the node. Think of it as *.ini configuration files in Windows program. Default values are set in the parameter and can be read or written if necessary. In particular, it is very useful when configured values can be modified in real-time. For example, you can specify settings such as USB port number, camera calibration parameters, maximum and minimum values of the motor speed.
Parameter Server When parameters are called in the package, they are registered with the parameter server which is loaded in the master.
Catkin The catkin 14 refers to the build system of ROS. The build system basically uses CMake (Cross Platform Make), and the build environment is described in the ‘CMakeLists.txt’ file in the package folder. CMake was modified in ROS to create a ROS-specific build system.
ROS Build The ROS build (rosbuild) 15 is the build system that was used before the Catkin build system. Although there are some users who still use it, this is reserved for compatibility of ROS, therefore, it is officially not recommended to use. If an old package that only supports the rosbuild must be used, we recommend using it after converting rosbuild to catkin.
roscore roscore 16 is the command that runs the ROS master. If multiple computers are within the same network, it can be run from another computer in the network. However, except for special case that supports multiple roscore, only one roscore should be running in the network. When ROS master is running, the URI address and port number assigned for ROS_MASTER_URI environment variables are used. If the user has not set the environment variable, the current local IP address is used as the URI address and port number 11311 is used which is a default port number for the master.
rosrun rosrun 17 is the basic execution command of ROS. It is used to run a single node in the package. The node uses the ROS_HOSTNAME environment variable stored in the computer on which the node is running as the URI address, and the port is set to an arbitrary unique value.
roslaunch While rosrun is a command to execute a single node, roslaunch 18 in contrast executes multiple nodes. It is a ROS command specialized in node execution with additional functions such as changing package parameters or node names, configuring namespace of nodes, setting ROS_ROOT and ROS_PACKAGE_PATH, and changing environment variables 19 when executing nodes. roslaunch uses the ‘*.launch’ file to define which nodes to be executed. The file is based on XML (Extensible Markup Language) and offers a variety of options in the form of XML tags.
bag The data from the ROS messages can be recorded. The file format used is called bag 20 , and ‘*.bag’ is used as the file extension. In ROS, bag can be used to record messages and play them back when necessary to reproduce the environment when messages are recorded. For example, when performing a robot experiment using a sensor, sensor values are stored in the message form using the bag. This recorded message can be repeatedly loaded without performing the same test by playing the saved bag file. Record and play functions of rosbag are especially useful when developing an algorithm with frequent program modifications.
ROS Wiki ROS Wiki is a basic description of ROS based on Wiki (http://wiki.ros.org/) that explains each package and the features provided by ROS. This Wiki page describes the basic usage of ROS, a brief description of each package, parameters used, author, license, homepage, repository, and tutorial. The ROS Wiki currently has more than 18,800 pages of content.
Repository An open package specifies repository in the Wiki page. The repository is a URL address on the web where the package is saved. The repository manages issues, development, downloads, and other features using version control systems such as svn, hg, and git. Many of currently available ROS packages are using GitHub 21 as repositories for source code. In order to view the contents of the source code for each package, check the corresponding repository.
Graph The relationship between nodes, topics, publishers, and subscribers introduced above can be visualized as a graph. The graphical representation of message communication does not include the service as it only happens one time. The graph can be displayed by running the ‘rqt_graph’ node in the ‘rqt_graph’ package. There are two execution commands, ‘rqt_graph’ and ‘rosrun rqt_graph rqt_graph’.
Name Nodes, parameters, topics, and services all have names 22 . These names are registered on the master and searched by the name to transfer messages when using the parameters, topics, and services of each node. Names are flexible because they can be changed when being executed, and different names can be assigned when executing identical nodes, parameters, topics, and services multiple times. Use of names makes ROS suitable for large-scale projects and complex systems.
Client Library
ROS provides development environments for various languages by using client library 23 in order to reduce the dependency on the language used. The main client libraries are C++, Python, Lisp,and other languages such as Java, Lua, .NET, EusLisp, and R are also supported. For this purpose, client libraries such as roscpp, rospy, roslisp, rosjava, roslua, roscs, roseus, PhaROS, and rosR have been developed.
URI A URI (Uniform Resource Identifier) is a unique address that represents a resource on the Internet. The URI is one of basic components that enables interaction with Internet and is used as an identifier in the Internet protocol
MD5 MD5 (Message-Digest algorithm 5) 24 is a 128-bit cryptographic hash function. It is used primarily to verify data integrity, such as checking whether programs or files are in its unmodified original form. The integrity of the message transmission/reception in ROS is verified with MD5.
RPC RPC (Remote Procedure Call) 25 stands for the function that calls a sub procedure on a remote computer from another computer in the network. RPC uses protocols such as TCP/IP and IPX, and allows execution of functions or procedures without having the developer to write a program for remote control
XML XML (Extensible Markup Language) is a broad and versatile markup language that W3C recommends for creating other special purpose markup languages. XML utilizes tags in order to describe the structure of data. In ROS, it is used in various components such as .launch, .urdf, and package.xml.
XMLRPC XMLRPC (XML-Remote Procedure Call) is a type of RPC protocol that uses XML as the encoding format and uses the request and response method of the HTTP protocol which does not maintain nor check the connection. XMLRPC is a very simple protocol, used only to define small data types or commands. As a result, XMLRPC is very lightweight and supports a variety of programming languages, making it well suited for ROS, which supports a variety of hardware and languages.
TCP/IP TCP stands for Transmission Control Protocol. It is often called TCP/IP. The Internet protocol layer guarantees data transmission using TCP, which is based on the IP (Internet Protocol) layer in the Internet Protocol Layers. It guarantees the sequential transmission and reception of data.TCPROS is a message format based on TCP/IP and UDPROS is a message format based on UDP. TCPROS is more frequently used in ROS.
CMakeLists.txt Catkin, which is the build system of ROS, uses CMake by default. The build environment is specified in the ‘CMakeLists.txt’ 26 file in each package folder.
package.xml An XML file 27 contains package information that describes the package name, author, license, and dependent packages.